
부품정렬기(Parts Feeder)는 자동화의 시작에서 필요한 장치입니다.
용어의 뜻은 부품(Parts)을 자동으로 정렬하여 공급(Feed)하는 장치(er)입니다.
부품이 정렬이 되어야 자동으로 작업이 시작될 수 있기 때문이지요,
부품을 정렬하는 방법은, 사람은 만능이니까 수동으로 사람이 직접 할 수 있지만 단순작업이라 싫어하고, 비용도 비싸므로
오래전부터(60년대초부터) 자동으로 부품을 정렬하는 장치를 만들어 왔습니다.
부품정렬기의 종류로는 진동정렬기(Vibrating Feeder), 회전진동기(Rotating Feeder),, 등,
그리고 최근에는 만능의 머신비전을 결합한 로봇정렬기도 나왔습니다. 아직 비싸긴 하지만,
먼저 제일 많이 사용하는 진동정렬기의 원리를 설명하겠습니다.
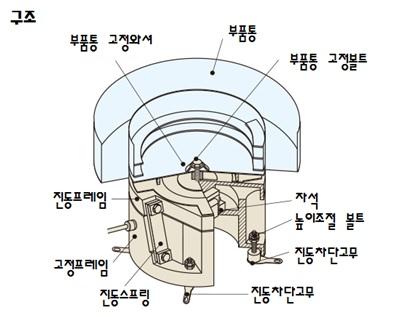
컨트롤러의 신호에 따라 진동프레임이 전자석으로 끌려 오고, 신호가 바뀌면 진동스프링의 탄성으로 복귀합니다.
진동스프링이 좌측으로 기울어져 있으므로 진동프레임은 좌측아래로 끌려 내려 갔다가 다시 복귀하고, 탄성으로 우측으로 올라 갔다가 내려오는 동작을 합니다.
이때문에 부품은 이와 조금씩 우측방향으로 움직이는 것이 되고 계속 반복하여 부드럽게 돌게 됩니다.
이러한 동작이 계속 반복하여 진동프레임의 진동에 따라 부품들이 우측방향으로 전진하게 됩니다.
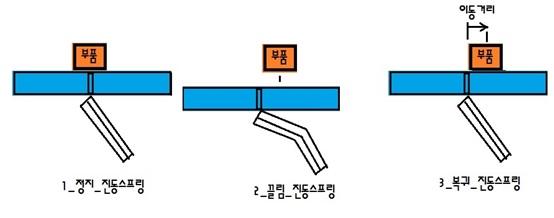
위의 그림으로 설명하면,
1. 정지상태 진동스프링과 부품위치 입니다.
2. 제어신호에 따라 전자석에 의해 프레임진동이 끌리면, 진동스프링이 휘어지고 빠르기 때문에
부품이공중에 잠시 떴다가 내려 옵니다.
3. 제어신호가 바뀌고 진동스프링이 스프링 힘으로, 처음위치로 복귀합니다.
(결과적으로 부품이 조금 오른쪽으로 이동했습니다.)
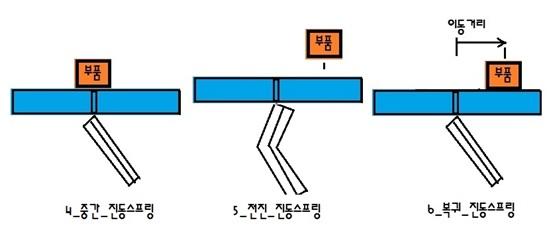
4. 복귀스프링의 중간지점에 돌아오고,
5. 탄성으로 인해 앞으로 전진합니다. 부품이 점프하면서 앞쪽으로 떨어집니다.
6. 복귀스프링이 다시 처음위치로 돌아 옵니다. (결과적으로 부품이 조금 오른쪽으로 더 이동했습니다.)
진동으로 움직이므로, 제어신호 주파수, 진동프레임과 진동스프링의 주파수가 중요합니다.
개발, 제작 사항은 메일(sicontrole@gmail.com)으로 연락 주세요,




