로그인하세요 GO
창닫기
로봇자동화
파렛타이징
핸들링
빈픽킹
사상/폴리싱
용접
자동라벨부착
산업용로봇
산업용로봇
델타로봇
스칼라로봇
KOWELL로봇
협동로봇
협동로봇
협동로봇100KG
비전검사
비전검사
자료실
자료실
PC버전
로그인
로봇자동화
산업용로봇
협동로봇
비전검사
자료실
자료실
자료실
자료실
MR-J3-B, E6, E7 ERROR 발생경우
씨컨트롤
|
2020-11-22
|
조회 6,793
글쓰기
목록
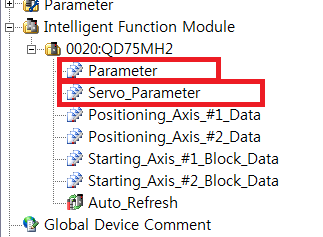
PLC PARAMETER에서,인텔리전트 모듈세팅에서,
PARAMER와 SERVO PARAMETER의 FORCED STOP을 INVALID로 수정합니다.
번호
제목
등록자
등록일
조회수
45
현대로봇 Hi6, HRPLC 의 주소설명
씨컨트롤
2025.09.09
628
44
현대로봇 hi6의 리모트 IO 설정방법
씨컨트롤
2025.09.09
629
43
Autonics, Encoder 오토닉스 엔코더 사용방법
씨컨트롤
2025.09.06
1,069
42
LS XBL-EIPT 모듈 사용하기
씨컨트롤
2024.08.22
3,080
41
YASKAWA ROBOT 이더넷을 통해 PLC와 데이타 주고 받기
씨컨트롤
2024.08.22
2,878
40
yaskawa robot, 티칭, programming command 설명
씨컨트롤
2024.05.24
3,752
39
협업로봇 AUBO 티칭 펜던트 사진
씨컨트롤
2023.04.30
3,089
38
현대로봇 티칭 펜던트 사진
씨컨트롤
2023.04.30
3,623
37
Codesys에 CAN 센서(혹은 장치)를 연결하는 방법
씨컨트롤
2023.03.10
3,006
36
RS485통신 설명
씨컨트롤
2022.10.23
4,878
1
2
3
4
로그인
PC버전
오시는길
(c) sicontrol.co.kr
l
이용약관
l
개인정보취급방침